

Die Idee von 3D-Vision ist die Gewinnung von Distanzinformationen aus einer Szene. Dazu gibt es drei verbreitete Verfahren, von denen jedes seine Vorzüge und Schwächen aufweist. Stettbacher Signal Processing AG (SSP) hat eine preiswerte und leistungsstarke Stereo-Kamera basierend auf ihrer O-3000 Kamera-Technologie entwickelt.
Es ist so selbstverständlich, dass es uns kaum auffällt: Unsere zwei Augen liefern uns nicht nur ein Abbild der Umgebung. Sie vermitteln uns zudem einen dreidimensionalen Eindruck von dem, was uns umgibt. Das äussert sich insbesondere darin, dass wir den Abstand zu einem Objekt im Sichtfeld sehr leicht und genau abschätzen können, was im Alltag – nebst der Erkennung von Objekten – eine der wichtigsten Fähigkeiten überhaupt ist. Stereo-Kameras funktionieren nach dem genau gleichen Muster. Aus der Korrelation von zwei Bildern, die aus verschiedenen Perspektiven aufgenommen wurden, lässt sich die Distanzinformation gewinnen.
Im Gegensatz zu den Verfahren mit Structured Light oder Time of Flight (ToF) ist Stereo-Vision ziemlich rechenintensiv. Es beginnt damit, dass zuerst der Verzug der Bilder (bedingt durch die Kamera-Objektive) korrigiert und die Ausrichtungen der beiden Kameras sehr genau egalisiert werden müssen. Beides geschieht typischerweise durch eine initiale Kalibration und anschliessende mathematische Transformationen der Bilder. Glücklicherweise erledigen das moderne und preiswerte Embedded CPUs ohne Schwierigkeiten. Anschliessend zeigen sich dann zwei wesentliche Vorteile gegenüber den alternativen Technologien: Im Gegensatz zu Structured Light ist für den Betrieb der Stereo-Kamera keine spezielle Beleuchtung notwendig und im Vergleich zu ToF liefern optische Kameras eine hohe Bildauflösung. Damit ist es möglich, grössere Szenen aufzunehmen und darin ein (möglicherweise bewegtes) Objekt zu suchen, während ToF-Kameras in der Regel a priori auf das gesuchte Objekt ausgerichtet sein müssen. SSP setzt für das Suchen eines Objekts im Bild je nach Aufgabenstellung entweder ein geometrisches Verfahren ein, oder Machine Learning mit Neuronalen Netzwerken. Bei-de Verfahren ergänzen sich optimal und sind äusserst mächtig, insbesondere das Maschinelle Lernen.
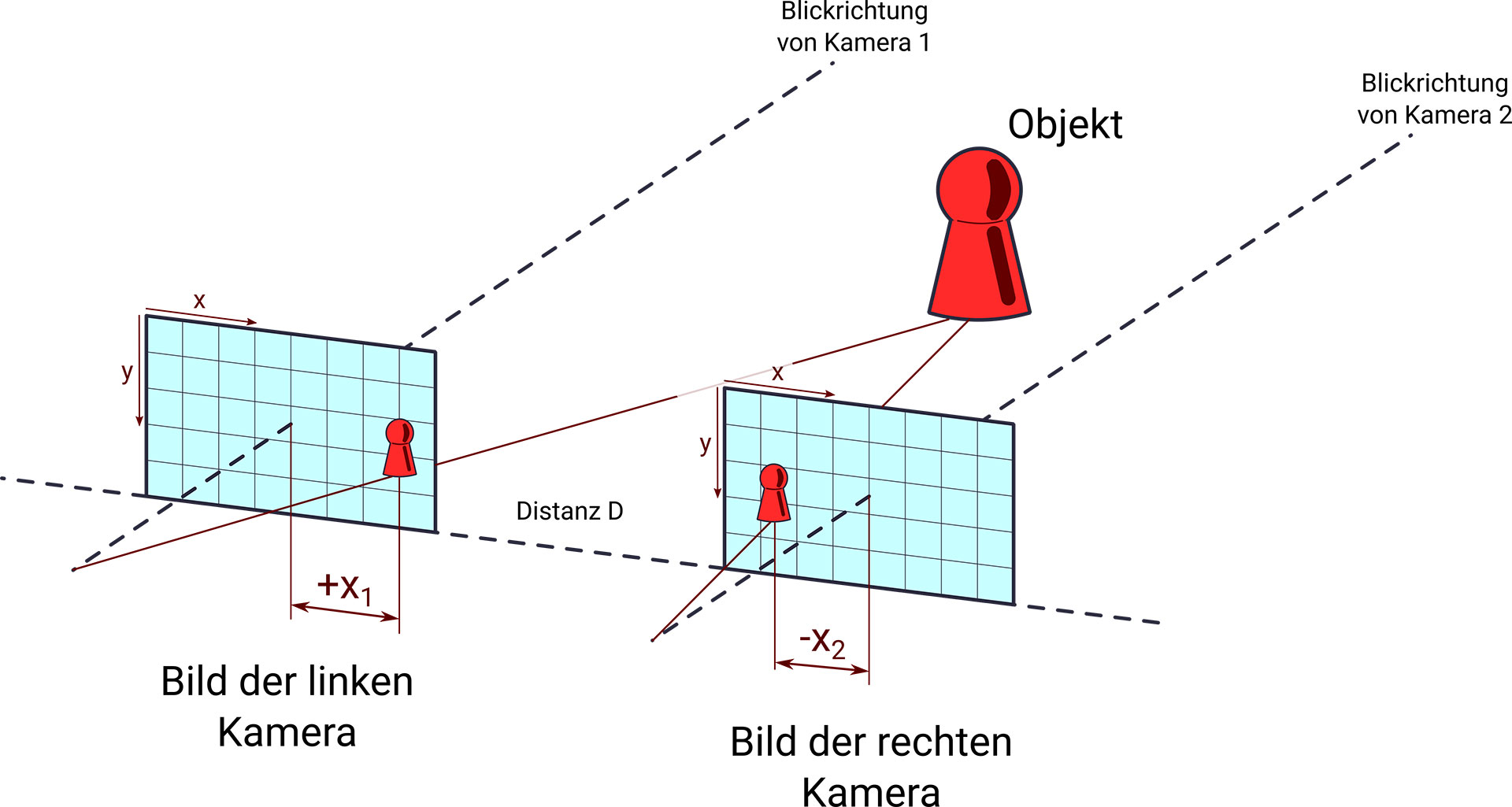
Stereo-Kameras werten zwei Bilder der selben Szene aus, die aus leicht unterschiedlichen Perspektiven aufgenommen wurden. Dabei erscheint ein Objekt in beiden Bildern an unterschiedlichen Orten. Durch lokale Korrelation der Bilder lässt sich sowohl die Distanz zum Objekt, als auch der Ort im Raum ermitteln.
Die Abbildung zeigt eine Stereo-Kamera von SSP. Auf Wunsch ist ein IP67/69K-Gehäuse erhältlich. Die äusseren beiden Kameras liefern monochrome Bilder. Sie werden für die Berechnung der Tiefeninformation verwendet. Je nach Geometrie des Setups erzielt man Messgenauigkeiten bis in den tiefen Promille- oder gar Sub-Promille-Bereich. Optional kann die Stereo-Kamera von SSP mit einer dritten Kamera ausgestattet sein. Diese ist im Zentrum montiert und liefert Farbbilder für eine allfällige Visualisierung der Szene. Alle Kameras verfügen über einen globalen Shutter und sind hardwaremässig synchronisiert.
SSPs Stereo-Kamera lässt sich verschieden einsetzen: Sie kann ein einzelnes Objekt im Bild suchen und im Raum vermessen, oder sie kann mehrere Objekte des selben Typs lokalisieren und jedes einzeln vermessen, und schliesslich lässt sich auch die Tiefeninformation für das ganze Bild bestimmen. Insgesamt ist das Stereo-Vision-System eine preiswerte, äusserst flexible und sehr präzise Lösung für die Objekt-Erkennung und Lokalisierung.