O3000 – Open-Source Kamera
Key Features
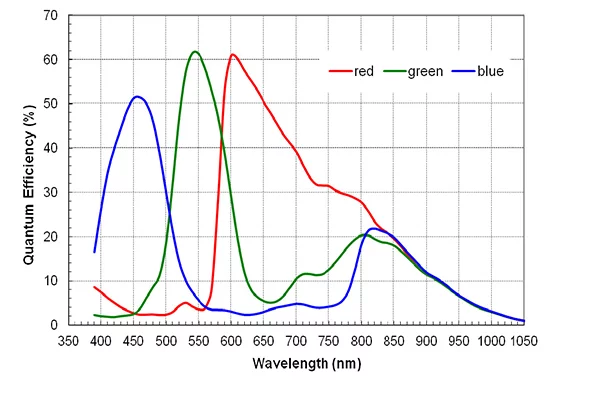
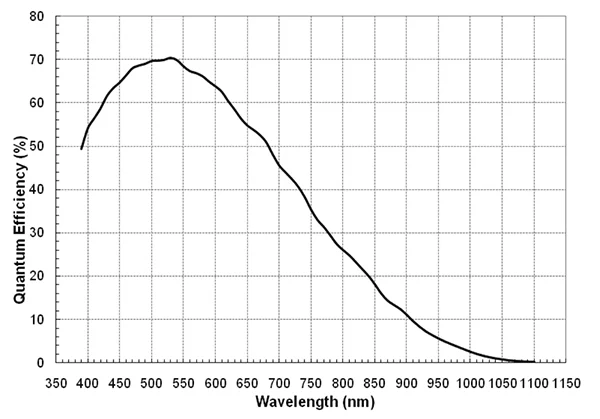
- Available in color and monochrome versions
- Available as a board-level camera or with housing
- Very compact form factor (board 36 x 36 mm)
- High-Speed USB 2.0 interface
- High Dynamic Range (HDR) mode
- Excellent low-light performance
- Automatic and manual exposure modes
- Available with S-, C-, and CS-Mount lens holders
- External flash synchronization output
- Extended temperature range
- Open-source driver for Linux, MacOS X, Windows
- Open API specification
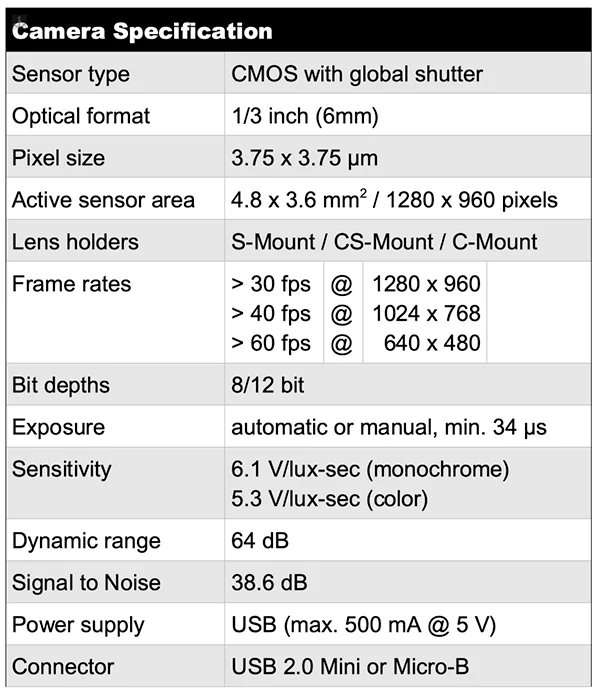
Technical Specifications
Documentation
Special Features of the O3000 – Open-Source Camera
- User-programmable Region of Interest (ROI): If defined, the camera records and transmits only the selected area. This allows for a higher frame rate due to the reduced image size.
- High Dynamic Range (HDR) mode: The camera includes additional logic to enhance its dynamic range. This is especially beneficial in scenarios where the illumination within the scene varies from dark to bright or changes over time, common in surveillance applications. The output format in HDR mode is 20 bits per pixel.
- Horizontal and vertical mirroring modes: The camera can horizontally and/or vertically flip its image, providing flexibility in camera mounting.
- Digital binning mode: In binning mode, the output resolution is halved either horizontally or both horizontally and vertically. Binning reduces noise, resulting in a higher Signal-to-Noise Ratio (SNR), particularly improving low-light performance.
- Pulse Width Modulation (PWM) outputs: The camera offers two independent PWM outputs that can control an external light source. Alternatively, these pins can serve as digital inputs or outputs. Please note that the corresponding connector is only accessible on board-level cameras.
- Flash synchronization: A flash synchronization signal can be used to control a flash light. However, the corresponding connector is accessible only on board-level cameras.
- Synchronized operation of multiple cameras: The camera provides an additional connector for synchronization inputs and outputs. This feature can be used, for example, to implement a stereo camera or for 3D measurements. Please contact Stettbacher Signal Processing if you plan to use this feature.
- Open API Specification: The complete application programming interface (API) of the camera is freely available. This enables users to access the camera from any hardware supporting USB 2.0.
- By using the open API specification, users can write their own efficient camera interface for various hardware with or without an operating system. Users are not dependent on a closed-source driver, allowing virtually unlimited platform choices.
- The open API specification is a key for using the camera in embedded or deeply embedded applications. This is particularly advantageous for price-sensitive applications and for embedded systems with limited performance.
- Open source driver. For using the camera on PCs or embedded PC platforms, Stettbacher Signal Processing has released the source code of a driver and a demo application. The driver and demo application are available for Linux, MacOS X, and Windows (XP and above). Please refer to the website for more information.
- The open-source driver is written in C. It can be reused for end applications. The driver is available under the LGPL license. There are no charges for using the driver.
- The open-source demo application is written in Java. It is available under the GPL license.