
Real-Time Location System (RTLS)
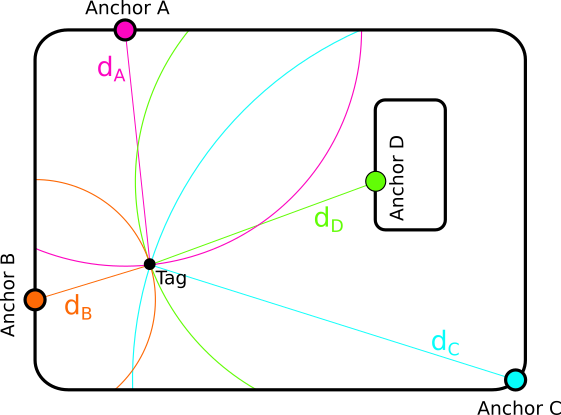
The real-time location system was developed for the localization of robots in warehouses. Through the use of Ultra Wide Band (UWB), distances between fixed anchors and mobile tags can be measured robustly and precisely. The accuracy of a distance measurement is within +/- 10cm. Individual distance measurements can be calculated into an accurate 3D position using statistical filtering methods.
The ability to use UWB as a communication medium also opens new doors for your product!

Have we piqued your interest?
Contact us for a free consultation.
Patrick Roth
043 299 57 23
roth@stettbacher.ch
Features
- +/- 10 cm accuracy
- Up to 70 m distance between anchor and tag (LoS)
- Up to 260 measurements per second
- Individually developed external antenna allows flexible mounting
- Rotation-invariant tag antenna
- Directional anchor antenna
- Serverless mode with wireless synchronization for maximum flexibility
- Server mode for maximum performance
- Flexible power supply: Power-over-Ethernet (PoE), internal battery, or external supply
